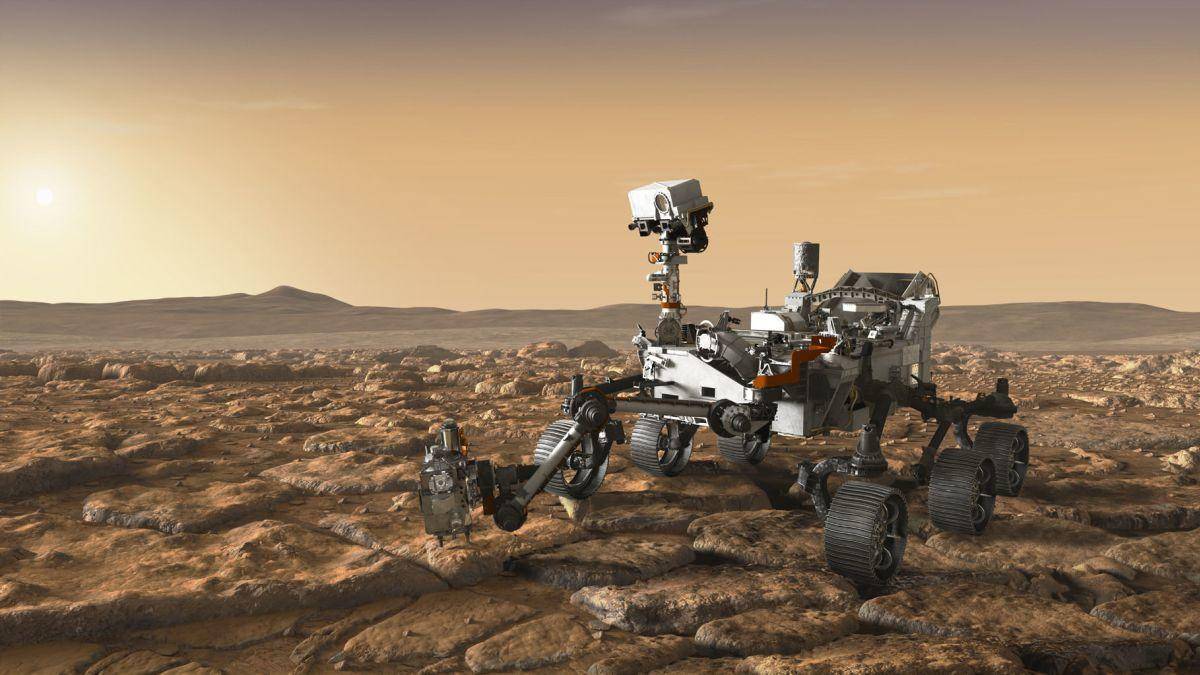
图:艺术家描绘的土卫泰坦上的变形机器人及其多样的组件。
当你可以一次性发送多个探测器而非仅仅一个去探索新世界的时候,何乐而不为呢?NASA高度概念化的变形机器人---由可部署的几台小机器组成的模块化,可变形,可自组装的机器人---就是基于这样的想法而诞生的。
这种变形机器人的构想目前属于NASA“创新先进概念”项目(NIAC)的一部分,该项目旨在鼓励研究人员想出探索遥远世界的创新性新方法。根据NASA喷气推进实验室(JPL)发布的消息,变形机器人由机器人专家Ail Agha和他来自斯坦福大学及康奈尔大学的同事在该实验室负责设计和组装。

该空中两栖机器人仍处于其研发初期,一旦该构想被证实可行,机器人就可用于探索太阳系中除地球外唯一存在液体的天体---尽管是些讨厌的油状液态甲烷---土卫泰坦的动态环境。

图:现阶段变形机器人的模型
目前为止,变形机器人早期测试的结果看起来很有希望,3D打印出的模型现在可以做到在地面滚动前进,但同时也可以将自身分裂成两部分,上半部分以无人机形态飞行。Agha及其同事表明这仅仅是个开始。他们最终在其他可选项中为机器人添置游泳,漂浮,探索洞穴的零件。

的确,该装置对于有着宽广的甲烷海,流动的河流和复杂地形的泰坦而言,将会很完美。按NASA所言,泰坦除了有洞穴系统,还有能喷发出氨或水的冰火山。至少可以说,能有一个机器人来探索泰坦的上述特征无疑是非常好的。

“我们现有的与地表成分,崎岖的地形,甲烷湖泊,冰火山相关的信息相当有限---我们所掌握的只有大概,但不知道具体细节。”Agha在NASA的新闻稿中说道,“所以我们考虑如何创造一个万用的,可穿越不同地形又袖珍到可以放在到火箭上的系统”
在机器人理想化的最终形态里,变形机器人将是可变形,模块化,可自行组装的,并由小的被称作“协作机器人”组成。每个协作机器人将装备小的推进器,使它们可以各自独立地移动。协作机器人“也可以探查洞穴,并形成链以与地表保持联系,”NASA表示,“或者变为球状在平坦的表面滚动以节约能源。”
一旦到了泰坦的地表,系统的着陆部分,或Agha所说的“母船”,将为它的协作机器人军队提供能源。同时,着陆器也可以装备丰富的科学仪器和工具。团队估计,一个大约3米(9英尺)宽的着陆器---差不多和2005年探访泰坦的惠更斯着陆器一样大---可装载10个协作机器人。但与其他着陆不同的是,该着陆器能够飞越泰坦稠密的大气。

虽然变形机器人现在还是半自动的,仍需要人来指导,但出于探索泰坦的复杂性,最终机器人将能完全依靠自己完成工作,更别说控制它所有的可移动部件了。考虑到信号要花去超过70分钟才能到达泰坦,全依靠地球的任务控制人员来操作系统将是非常尴尬的。
… ?很显然现在还有许多要做的工作,变形机器人还远未做好准备。幸好我们还有NASA的“蜻蜓”无人机可以期待。这架旋翼飞机的着陆器计划于2026年发射并在2034年左右抵达泰坦。

泰坦是土星最大的卫星,太阳系第二大的自然卫星。它同时也是已知的唯一一个有着稠密大气的卫星。泰坦是受土星引力绕其运动的第六颗卫星。由于泰坦有月球的1.5倍大,质量更是月球的1.8倍,因此常被称为类似行星的卫星。作为太阳系中仅次于木卫三的第二大卫星,泰坦比水星还要大,但质量只有水星的2/5 。
参考资料
1.WJ百科全书
3. George Dvorsky-小韩-gizmodo
翻译:天文志愿文章组-小韩
审核:天文志愿文章组-
终审:天文志愿文章组-
排版:天文志愿文章组-零度星系
美观:天文志愿文章组-
参考资料
1.WJ百科全书
3.原文来自: https://gizmodo.com/cool-nasa-concept-envisions-a-shapeshifting-robot-to-ex-1838527042
(